父の先見



父の先見
ニューロンから知能ロボットへ
啓学出版 1984
James S. Alubus
Brains, Behavior, and Robotics 1981
[訳]小杉幸夫・林巌・亀井宏行
編集:啓学出版編集部 協力:林輝
装幀:荒瀬光治
関英男さんが『ロボットロジー』(ダイヤモンド社)を編著したのは、オブジェマガジン「遊」創刊の1971年だった。「人間と機械の共生」というサブタイトルがついていた。
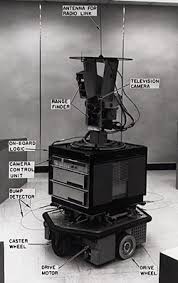
いよいよ日本でもグレイ・ウォルターが作った「タートル・ロボット」や1966〜1972年にスタンフォード研究所が開発した「シェーキー」に匹敵する推論型の可動ロボットが出てくるか、それともイタリア未来派(1106夜)の機械動学幻想やフィリップ・K・ディック(883夜)の超ネットワークVALIS幻想が少しは現実味を帯びたロボットに移っていくのかと思ったが、そうではなく、工学がロボットに向かうにはどうすればいいかをガイドしている程度で、ああ、日本まだここかと感じたものだった。
関さんは日本の電波工学のパイオニアで、早くからのリーダーである。1952年に『電波と電子の世界』(刀江書院)を、2年後に『雑音』(岩波書店)を、1959年に『エレクトロニクスの話』(岩波新書)を書いて、電子工業の分野のみならず武満徹(1033夜)や湯浅譲二や高橋悠治をはじめとした現代音楽家からの注目を一身に集めた。
60年代後半からはその目は情報工学全般に及び、『情報理論』(オーム社)、『情報工学ハンドブック』(森北出版)などをまとめる一方、しだいに電子と意識の関係に着目するようになり、『情報科学と五次元世界』(NHK出版)を皮切りに、サイ科学の開拓にとりくんで、たとえばソニーの井深大に多大な影響をもたらしていた。ぼくは井深さんがサイババと関さんを並べて語るのを聞いて、腰を抜かした。
実際、関さんの意識科学やサイ科学へのとりくみはあまりにオカルティックな向学心に走ったようで、「陽子が歪むと癌になり、中性子が歪むとエイズになる」といった発言についていけない研究者も続出した。ぼくも何度かお目にかかって話し込み、その理論をまとめるべく『サイ科学の全貌』(工作舎)なども編集構成したのだが、ほとんど売れなかった。そのあたりの構想は、いまは『高次元科学』1・2(中央アート出版社)で読める。
もっとも、ごく最近になって生体の量子的データ化が進むようになって、再びサイ科学が浮上してきたとも聞いた。VRの先端を行く水口哲也さんからの聞きづてだ。
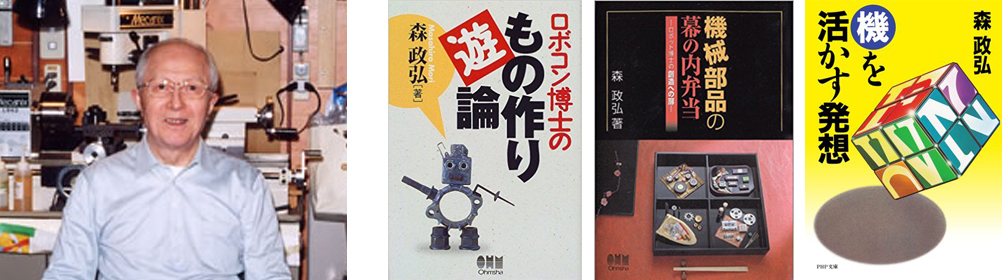
関さんが広がりを求めていったのに対して、日本のロボット学を中核となって牽引していたのは森政弘さんである。関さんより22歳年下だ。
森さんはいつもユーモアが出入りしていた工学者で、ロボット博士の異名で呼ばれていた。名大で電気工学や制御工学を修めたのち、折からのオートメーション時代に必須となる技術全般に関心をもち、東工大で制御技術のリーダーシップをとると、シーケンス制御、サイバネティック・モーション仮説、ロボット工学、バイオメカニズム、「不気味の谷」理論、創造工学などの独創的なアイディアや仮説を次々に連打して、一挙に国や役所や産業界をロボット旋風に巻き込んでいった。
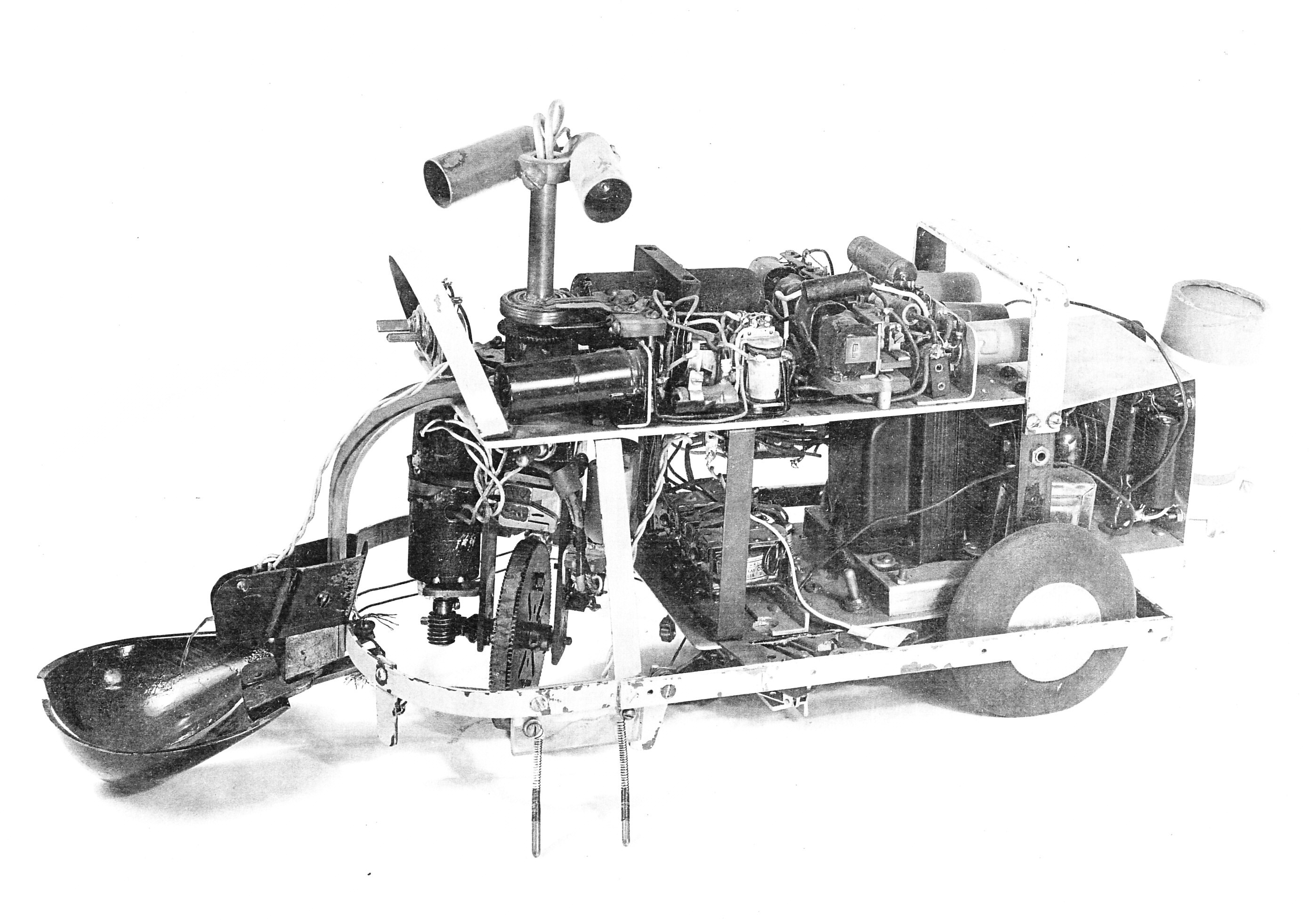
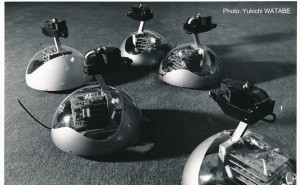
1975年の沖縄海洋博で自在研究所(松原季男)に製作させた「みつめむれつくり」は、日本初の自律分散型ロボットの出現で、それなりに気を吐いていた。
森さんの著書は『制御と情報』(NHK出版)、『基礎制御工学』(東京電機大学出版局)といった専門書や入門書よりも、『発想工学のすすめ』(講談社ブルーバックス)、『ロボット考学と人間』『機械部品の幕の内弁当』『ロボコン博士のもの作り遊論』(いずれもオーム社)といった発想のひねりがはぜた本や、晩年に打ち込んだ仏教に裏打ちされた『機を活かす発想』(プレジデント社)、『森政弘の仏教入門』『退歩を学べ』『仏教新論』(いずれも佼成出版社)などが穿っていた。
なかでも「不気味の谷」をめぐる議論がユニークだ。「不気味の谷」(uncanny valley)というのは、絵画や人形やロボットが人間の外見を精巧に写実していく過程で、それを見る側の者が最初に抱いていた好感が反転して嫌悪感をもつという、心理的知覚が「谷」をまたぐ現象をさしたもので、森さんはその「谷」を超えるとふたたび好感が回復するとみなした。
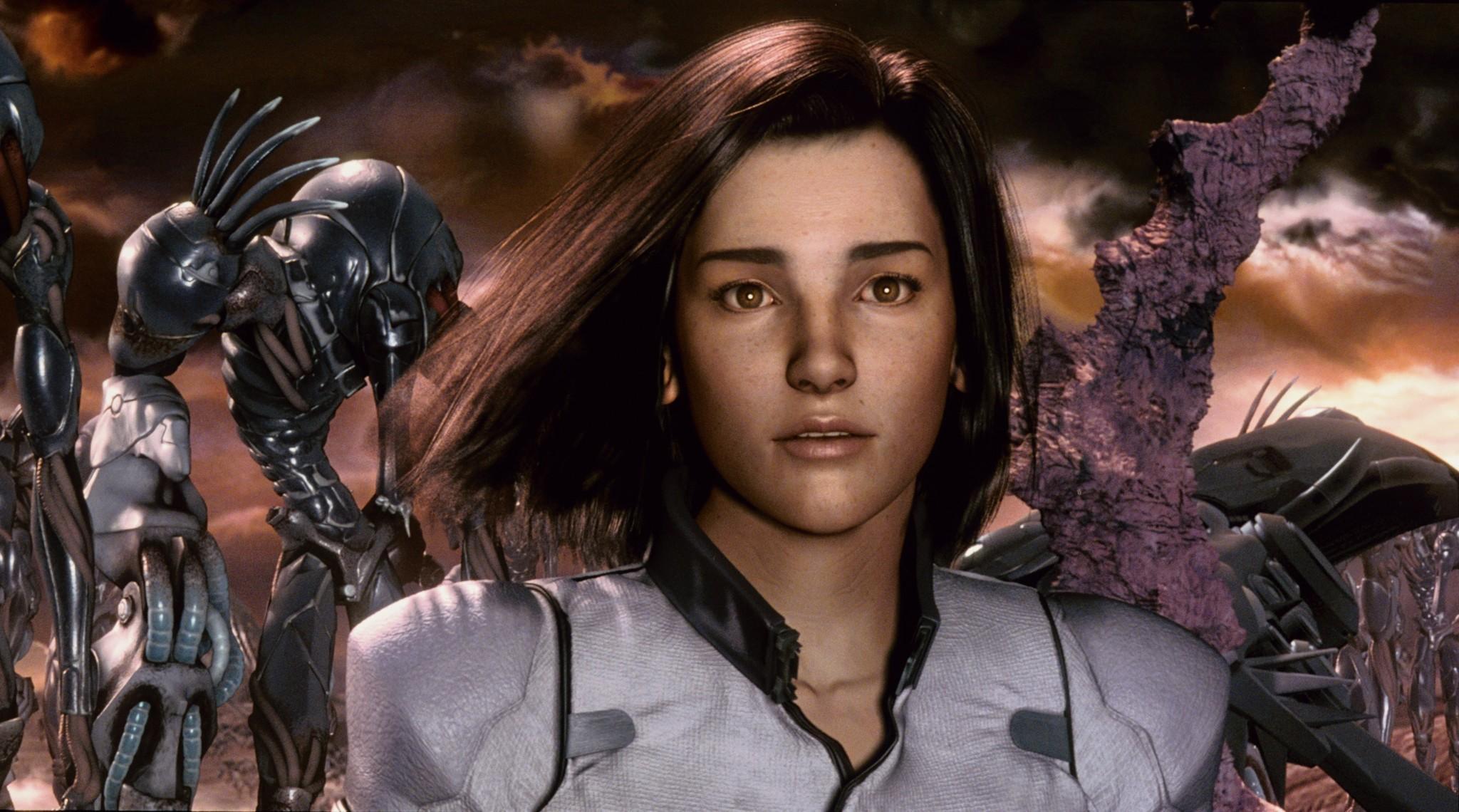
この議論はかなり反響が大きかった。ロボットが人間の外見に近くなっていくと、かえって「気もちが悪い」という感情の反応がおこり、そこが問題になるからだ。「不気味の谷」の問題は、スーパーリアリズムの絵画の評価にも、CGの画像再現力の精度をどこまで上げていってもアピールするのかというような問題にもかかわってくる。実際にものちのことだが、スクウェア・ピクチャーズの映画『ファイナルファンタジー』が興行的に失敗したのは「不気味の谷」の犠牲を被ったからだと説明された。
この点について森さんは、産毛までも再現した精巧な義手は人々に不気味の「谷」をもたらし、文楽人形は「谷」を超えたアクチュアルな表現になっていると説明した。
一方、これものちのことだが、大阪大学の石黒浩はあえて「不気味の谷」を突っ切ることを方針に、ジェミノイド「ミナミ」や自分そっくりの「HIー4」を制作してみせた。

さて、ぼくがアルバスの『ロボティクス』を手にしたのは「遊」を休刊して元麻布に引っ越し、数人で松岡正剛事務所を始めた頃で、電電公社が民営化するための移行プロジェクト(「情報文化」のためのフォーラムやNTTのコマーシャル制作)にとりくんでいたときだった。
80年代前半の日本はまだ「マルチメディア」や「高度情報通信」や「光通信」が合言葉になっていた時期である。シリコンバレーの一郭でワンチップ・コンピュータが誕生するなどとは誰も予想していない。そのため国も大学も企業も、理想的な方針成就に酔っていて、ニューロ・コンピューティングやエキスパート型AIや第五世代コンピュータのR&Dに血道を上げていた。
しかしながらいずれもめぼしい成果がなく、たとえば第五世代コンピュータは、1982年に通産省主導で570億円を投じた大型プロジェクトとして、鳴り物入りで非ノイマン型コンピュータや強力な並列推論ができるものをめざしていたのだが、数年後に低迷が露呈し、10年後にあえなく終息した。
そうしたなか、アルバスの『ロボティクス』が巷間に出回ったのだと憶う。さっそく読んだ。
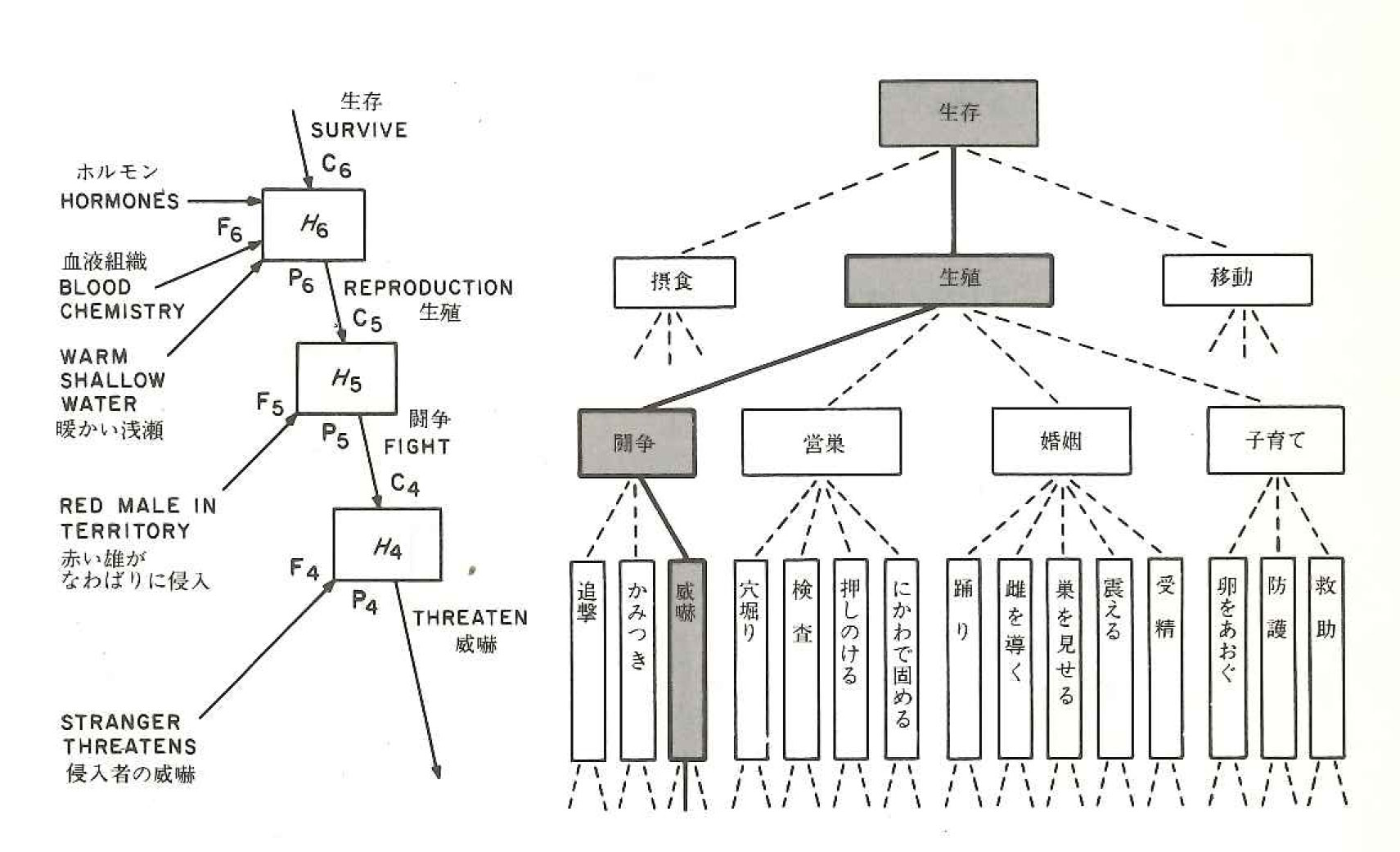
最初にショッピングセンター問題が提示され、ついでこれを解決するには、脳の構成要素をあきらかにする「脳の計算モデル化」を急ぐこと、人間が推断や行動を確定するときに動いているだろう「階層的目標探索制御システム」の研究を進めること、さらには意図の相互結合や物語性の発揮やリズムやハーモニーを認知表象する「高次機能のモデル化」がカバーされなければならないことが、たっぷりとした解説で提示されていた。
いまから見ればまだまだプリミティブな仮説が多いものではあるが、関さんや森さんの議論で育ってきたぼくはそれなりに興奮した。ぼくの80年代はデビッド・マーの『ビジョン』(産業図書)とアルバスの『ロボティクス』が飾っていたのである。マーのものは視覚と脳の計算理論を初めて明確に提出したものだった。しかし、これらはかなりの少数意見として、当時はほぼ軽視されていた(とくに日本では)。
ロボットは用途によってありきたりに分類されてきた。農業用ロボット、工業用ロボット、看護用ロボット、清掃用ロボット、娯楽用ロボットなどだ。これは開発技術的なタスクとは関係がない。そこで制御方法によって分けるようになった。操縦ロボット、シーケンス・ロボット、数値制御ロボット、感覚制御ロボット、プレイバック・ロボット、学習制御ロボット、適応制御ロボットなどとなる。
シーケンス制御ではリレー回路が活躍し、感覚制御にはいろいろのセンサーが装備され、適応制御ではモデル規範が用意される。学習制御ではもっぱら強化学習のしくみが工夫されてきた。
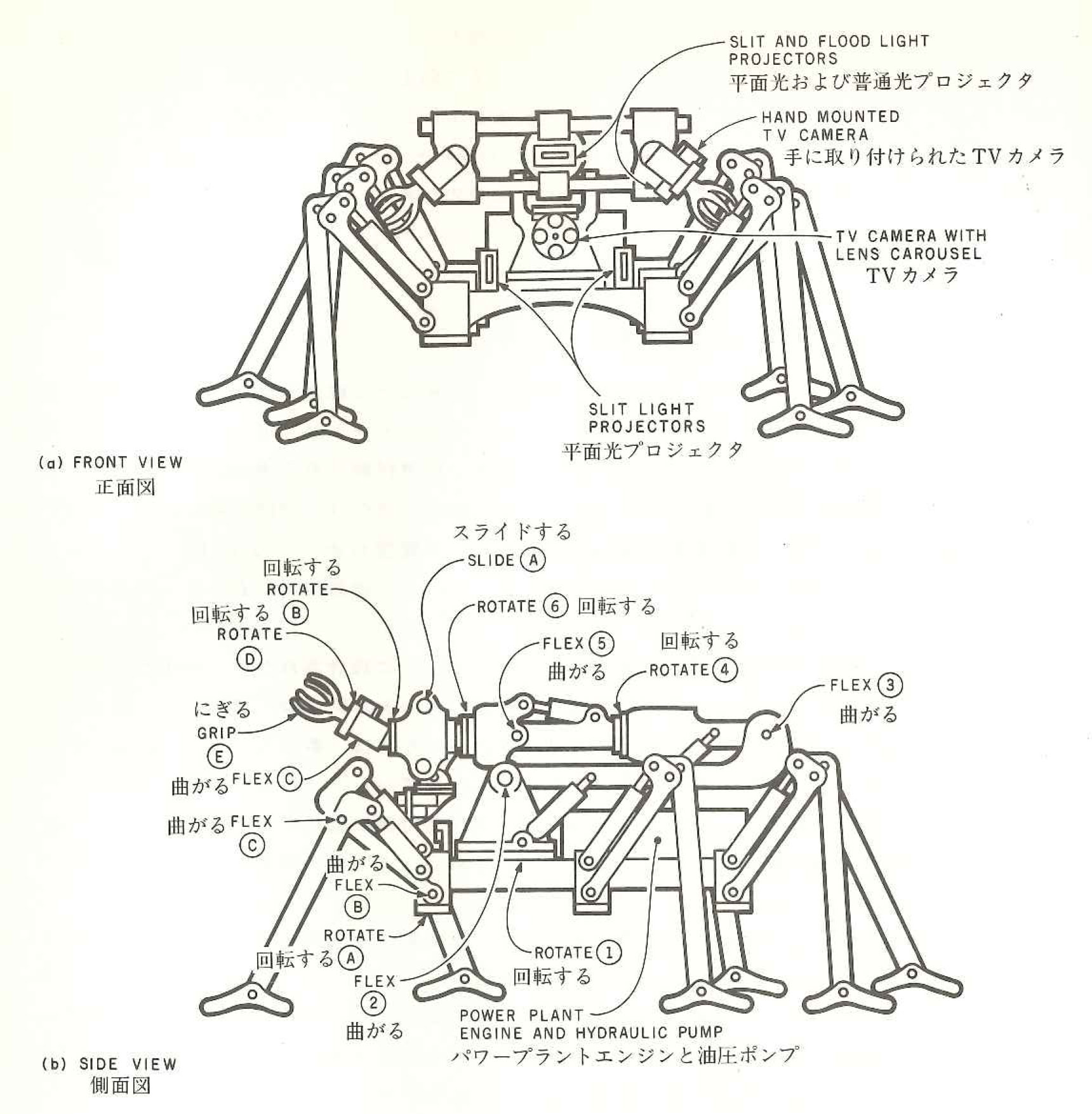
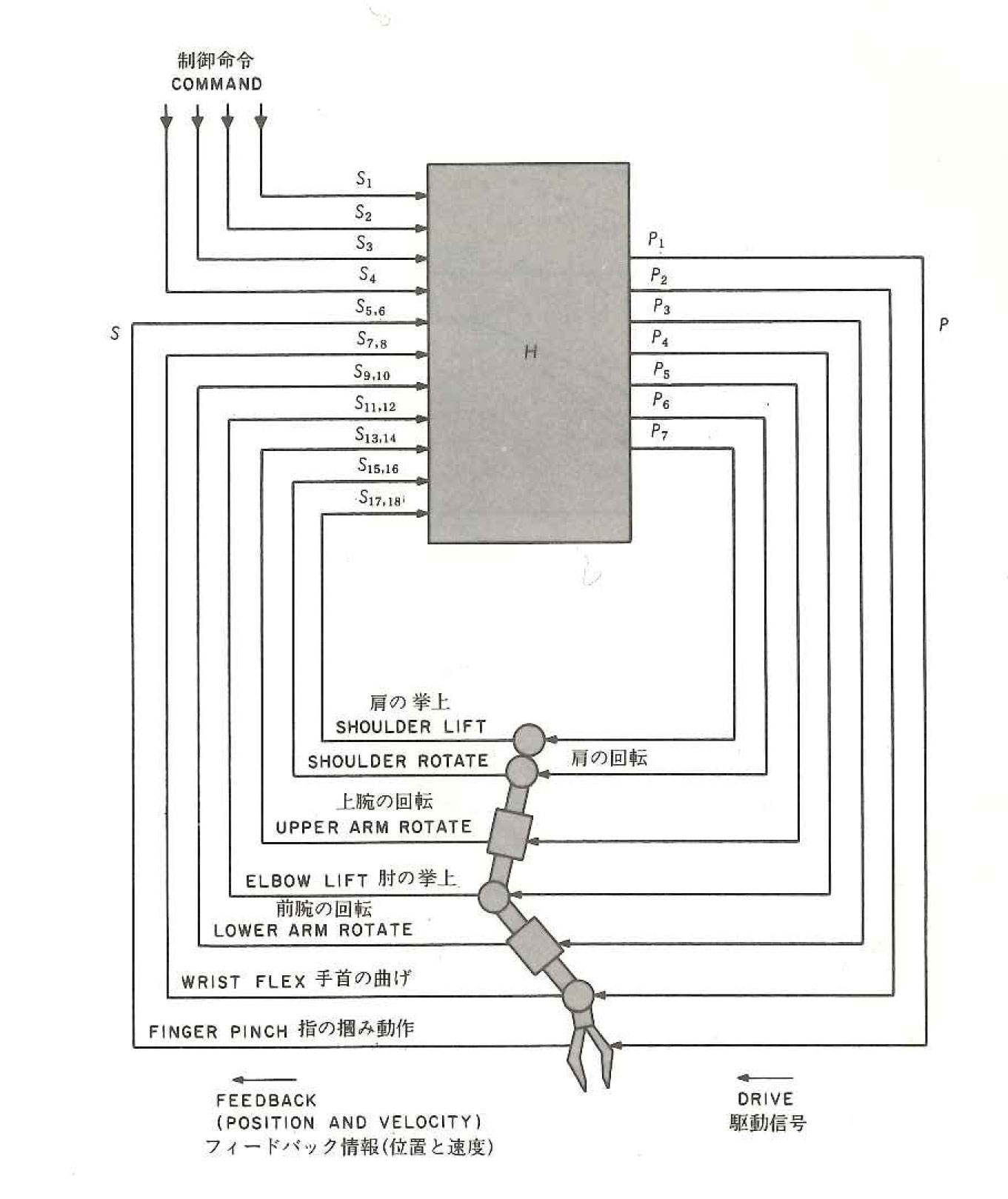
しかしアルバスはこうしたどんな分類にもとらわれることなく、新たな正攻法をもちだしていた。固有感覚(proprioceptive senses)が見えてこなくては物を取り扱う行動が成立しないのだから、ロボットにおける感覚入力(sensory input)にもそのコンポーネントを装着しなければならないという示唆は、そのひとつだ。
われわれは筋肉や関節の位置と速度と力量をたえずモニターし、それを神経系のサーボ機構にフィードバックしている。筋紡錘は筋肉の伸長度を測り、ゴルジ腱器は腱の緊張度を伝え、前庭器官は重力・角加速度を教え、自由神経終末はわずかな圧力でも触知覚に切り替える。ロボットはこれをアクチュエーター(サーボモーター)で代替する。このとき、これらの基本のコンポーネントになるのは固有感覚だというのだ。
一方、アルバスは、階層的目標指向行動(hierarchical good-directed behavior)を掴まえるには、状態(status)、軌跡(trajectories)、制御(control)がほぼ同時にベクトル関数として表示できなければならない、そこにさまざまなパラメーターとしての作用素が入れこめられていなければならないとも強調した。これもアルバス得意の新たな正攻法だった。
80年代末になると、ぼくは少しずつ「編集工学」(editorial engineering)を構想するようになった。人間の知覚や認知が音声や身振りや文字や言語や映像を使い、またさまざまな道具や器具やメディアを通して、情報をどのように編集しているのか、その多様な特徴に注目したいと思ったのだ。
そう思ったのは言語学や心理学に飽き足らなくなったせいと、機械工学や制御工学が人間のナマの知覚をあまり採り入れていないように見えていたからだ。このとき大きなヒントをもたらしてくれてのがマーとアルバスだったのだ。
たとえば注意(attention)である。人間の編集行為はなんであれ「注意のカーソル」が動くことから始まるのだが、なぜそのような注意はおこるのか。お茶が飲みたくてヤカンに水を入れてお湯にしたいと思うのは欲求だが、ヤカン、水道、ヤカンがいっぱい、ガスの点火、沸騰を待つ、ガスを消して急須を用意する、お茶を飲むという行為は、すべて別々の注意の連続的移行と展望とによって成り立っている。
アルバスはそのような注意には、人間の体性感覚や感覚情報の収集を容易にするための「配向」(orienting)と、これから始まる行為にとってより必要度の高いデータ情報を前面化するために低度の情報を遮断する「集中」(focusing)とがあると教えていた。これは注意のダイナミズムがフィルタリングのメカニズムと一緒に動いていることを指摘していた。
編集工学がゆるやかな階層的目標指向行動を活用しているはあきらかだった。ぼくはしばらくアルバスを教科書に、編集工学のノートをつくっていくことになる。まだパソコンが出始めたばかりの頃だ。
アルバスの研究の基礎にあるのは、小脳皮質で動くニューロン間の相互作用に関する計算モデルだった。CMAC(Cerebellar Model Arithmetic Computer)と名付けられた。多変量関数のセットを記憶・再生・演算するモデルだ。
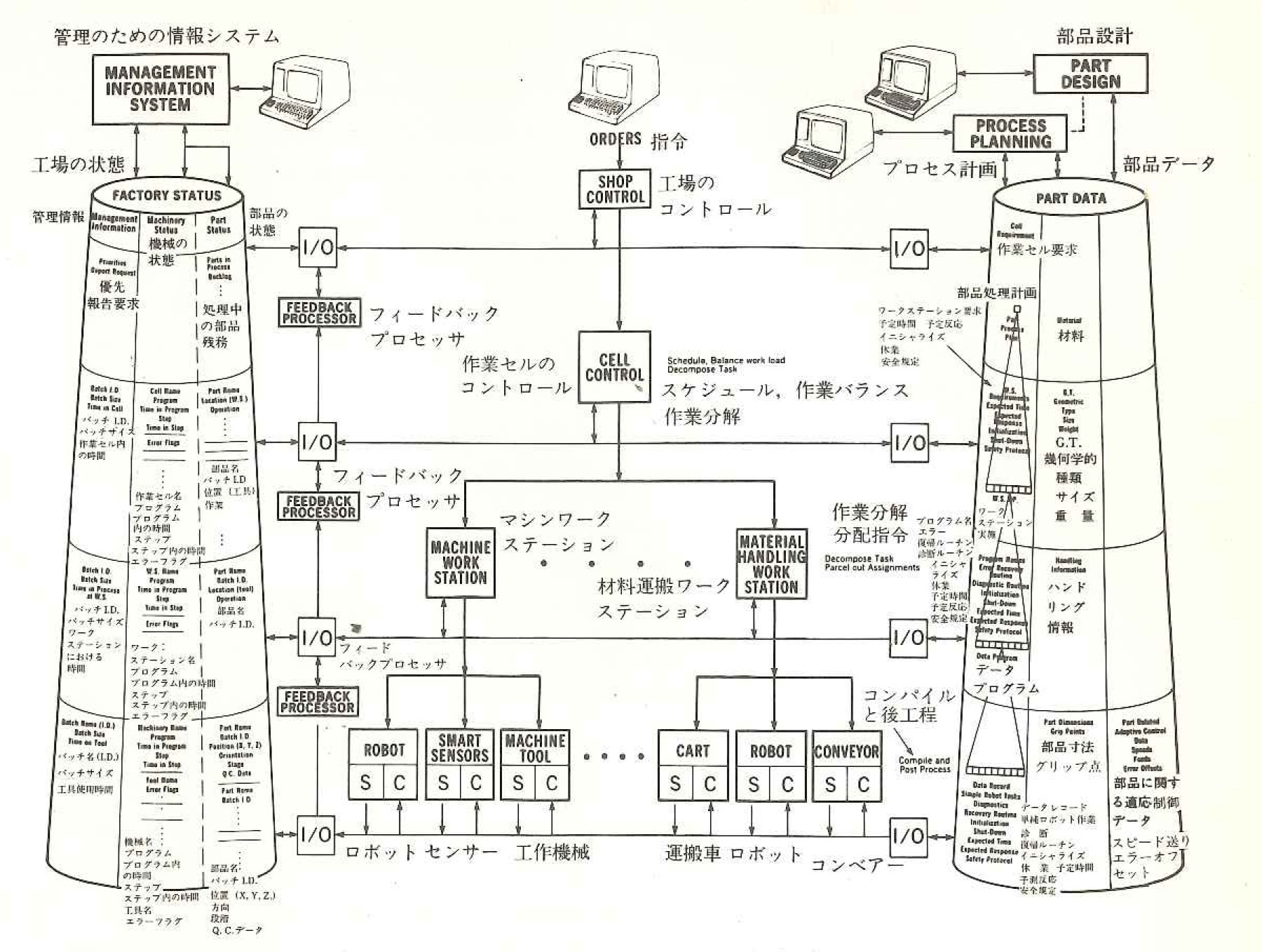
多変量サーボ制御、座標変換、条件分枝、タスク分解処理、IF/THENプロダクションルールなどの数学処理ができる。パターン認識や学習の推進に使えるわけだ。
やがてCMACは階層化されてロボットに応用されるようになった。小脳モデルを多段階分岐をもつ複合処理機能に導いて、そこに生成階層が出現するとみなして、そのソフトウェア設計に乗り出したのである。残念ながらその成否ははっきりしないままになっているが、この課題はその後のロボット工学や人工知能研究に譲られていった。
マーやアルバスのヒントは編集工学の初期起爆にはもってこいだったが、その後の充填には別の視点や考察が必要だった。まずは認知科学や人工知能の新たな展望に出会う必要があったし、新たなサイボーグ哲学やアンドロイド思想もほしかった。残念ながら当時は『現れる存在』(NTT出版)や『生まれながらのサイボーグ』(春秋社)のアンディ・クラークも、『猿と女とサイボーグ』(青土社)のダナ・ハラウェイ(1140夜)も、いなかったのだ。
ロボットについてはどうか。そう、まずはiRobot社のロドニー・ブルックスの登場を待つしかなかった。お掃除ロボットのルンバをつくったブルックスではない。包摂アーキテクチャ(subsumption archtecture)を提唱したブルックスだ。

⊕ ロボティクス―ニューロン知能ロボットへ ⊕
∈ 著者:J・S・アルバス
∈ 訳者:小杉幸夫・林 巌・亀井宏行
∈ 発行所:啓学出版株式会社
∈ 発行者:三井数美
∈ カバーデザイン:荒瀬光治
∈ 印刷:(株)昭和工業写真印刷所
∈ 製本:徳住製本所
∈∈ 発行:1984年5月31日
⊕ 目次情報 ⊕
∈ 第1章 精神と物質
∈ 第2章 脳の構成要素
∈ 第3章 感覚入力
∈ 第4章 中枢神経系
∈ 第5章 階層的目標指向行動
∈ 第6章 神経回路モデル
∈ 第7章 高次機能のモデル
∈ 第8章 ロボット
∈ 第9章 階層ロボット制御システム
∈ 第10章 人工知能
∈ 第11章 未来への展望
∈ 第12章 ロボット労働力
⊕ 著者略歴 ⊕
J・S・アルバス
1935年生まれ。NASAの人工衛星打ち上げ計画のなかで初期の衛星について光学および電子システム関係の技師として携わり、初めてロボットとの関わりを持つ。15年間のNASAでの在職中、人工知能のグループを指揮し、最も複雑なコンピュータ、人間の脳の持つ情報処理能力、計算能力についての研究を行った。1973年から、NBS(米商務省標準局)に移り、その後、米国内でもロボット工学の指導的な立場にある研究室を主催していた。