父の先見



父の先見
なぜMITのロボットは前進し続けるのか?
オーム社 2006
Rodney A. Brooks
Flesh and Machines - How Robots Will Change Us 2002
[訳]五味隆志
装幀:アトリエ渋谷
本書はブルックスの包括的なインテリジェント・ロボットに関する見解をまとめたもので、その後の、たとえばアイロボット社(ブルックスはCTO)でお掃除ロボット「ルンバ」を開発して大当たりをしたのちの、またAIロボットやシンギュラリティ議論が沸騰してからの、そういう新たなロボットは入っていない。Cogやキスメットやジンギスまでしか扱われていない。
だから、いかにMITの"ロボットの父"で、しばしば"ロボット風雲児"と言われてきたブルックスといえども、21世紀に入ってまもない2002年に上梓された本書では、すでに時代遅れとなった開発議論しかしていないのだろうと憶測されるかもしれないが、必ずしもそんなことはない。なんだか“老いの一徹”のような傾聴が、ある。
たしかに、本書以降の21世紀ロボットは年を追って格段に革新されてきた。作業ロボットも家庭ロボットも、AIロボットもAL(アーティフィシャルライフ)ロボットも、ヒューマノイドやアンドロイドも、そのR&Dの深度と速度はかなりめざましく、かつては思いもよらなかったようなセンサー技術やマニピュレーション技術や深層学習技術がロボット化できつつあるようになっている。
しかしそれでも、ブルックスが1986年に提起した「サブサンプション・アーキテクチャ」(SA=包摂アーキテクチャ)の方法思想は、いまなおかえって燃えさかっているように思う。本書にはその燃えさかる火が随処で多様な炎色反応を見せている。

ブルックスはずっと以前に京都で会ったかぎりはけっこう人なつこいし(トム・レイも一緒だった)、まずまずの日本贔屓でもあるが、文明の在り方についてはコンサバで頑固である。斬新なアイディアの持ち主ではあるけれど、技術信奉主義者ではないし、ICT一辺倒でもない。
つまり、何かが古い。あるいは何かにこだわっている。ところがそれが文明的機械進化のこだわりにも見える。
そもそもチューリング・マシン型の記号処理によるロボット設計に疑問をもっている。過剰なAIについても疑問をもってきた。あまりチューリング・マシンやAIに反旗を翻さなくともいいとは思うけれど、そのぶん早くから生物的で環境的な学習をする行動自律的なロボットに関心を向けてきた。多様なエージェント機能を分散自律的に並列処理できるロボットの開発をめざしたのだ。そこで提案したのが「サブサンプション・アーキテクチャ」(Subsumption Architecture)である。包摂アーキテクチャと訳されたり、略してSAと呼ばれてきた。
複雑で知的な動作をはたすべきロボットのしくみを、あらかじめ単純なモジュールに分割しておいて階層化し、これを動作の進展にあわせて優先順位がつくように仕立てて自律性を発揮するように仕向けようという設計思想のことをいう。状況とロボットとの関係の全体を制御する中枢機能を設けない設計とも、複雑なプログラムを必要としない設計ともいえる。はなはだ situeted な方法だ。
サブサンプション・アーキテクチャをもつロボットのモジュールは、ごくごく基本的な検知(sensing)と行動(action)ができる反応エージェントになっている。それぞれのエージェントは階層構造に所属する。
エージェントは階層上位になるにしたがって抽象的になるようにつくっておくのだが、下位でロボットが躓いたり停止したりするのを避けるように設計するため、つねに優先順位が決定できるようにする。
たとえば、最下層に「物体を避ける」とか「直線的に進む」というエージェントがあるとすると、その上には「見回る」「うろついてみる」「観察する」が、その上には「まだ行っていないところを探索する」があり、さらに上位には「その場の地図を作成する」「提案する」が待っているというふうになる。
各層のエージェントは全センサーのデータを参照できて、それぞれが装備したアクチュエーターを操作できるようにする。しかし、どの行動が実行されていても、優先順位の高いエージェントが途中で生成されれば、実行中の行動はいったん中断されて、その行動を選ぶ。先を越された行動は、優先実行がおわってから着手する。
このように、サブサンプション的なロボットは本来がボトムアップ的なのである。とくに一番下位の階層モジュールの判断を先行して重視する。こういうふうになっているので、中枢にあたるプログラムは必要ないということになる。
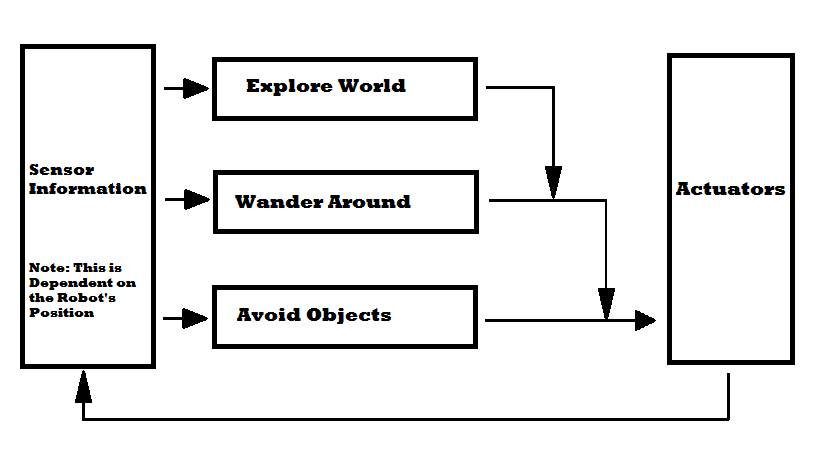
ブルックスの設計思想にもとづいて開発されたルンバの場合でいえば、アーキテクチャーの階層はそれだけだったのかというほどシンプルで、、大きくは「危険回避」(avoid)、「行動」(wander)、「目的」(explore)でできている。まずは障害物や危険を回避して、さまざまな行動をおこし、状況を把握していく。この一徹だ。
ルンバは部屋の壁、段差、家具などの障害物といった動作環境を、数十のセンサーからのデータをもとに毎秒60回ほどの計算をして、平均40パターンの行動オプションから優先順位をつけていく。これらのことは連続的にすばやく対応遂行しなければならない。ボーッとしたり、立ち止まったままになるのではまずい。ロボットは茫然としたらおジャンなのだ。評価もされない。そこで、ルンバにはiAdaptという高速応答処理装置が装填された。ルンバは動き出すと最初の10分間ほどで(最近は2〜3分か)、部屋の大きさや物体の配置や汚れ具合を測り、どの程度の時間で当面の掃除ができるかを算出しているらしいのだが、これを担当するのが、センサーから送られてきた状況データや経験データ(ファームウェア上のデータ)をもとにすばやく最適解を出すiAdaptである。Fetch(フェッチ)という地雷探査ロボットの技術からの応用だった。
このように、サブサンプション・アーキテクチャにもとづくロボットには必ずしも高度な知能をもたせる必要はない。知的な行動や判断ができるための設計をすればよい。表現力もいらない。「表象なき知性」(intelligence without representation)だけでいい。そういう思想だ。ブルックスはそのことを「虫」のふるまいに学んだ。昆虫は神経節しかもっていないが、それでも包摂環境を判定して自在に動く。そこに注目したわけである。
ふりかえって人間と器械の関係を見てみると、人類が棍棒や容器を使うようになって、すぐに思いついた器械らしきものは車輪だった。約8500年前のことだ。それがシュメール人によって動物が曳く荷車になるまではさらに3000年がかかったが、それによって人間は車輪を直接に動かすのではなく、馬に方向や速さを指示するだけでよくなった。これは器械が自立の第一歩を踏み出したということだ。水時計や風車がそんなふうにして工夫されていった。
ついで農業革命がおこって人間は定住をするようになり、都市と工場と農村が分離した。15世紀にグーテンベルクによって印刷革命がおこると、情報の再生産が容易になり、ここに写真術や版画術が加わっていった。18世紀になると、ニューコメンの蒸気エンジンとダービーの鉄の精錬がこの人間と器械の関係を強力にも高速にもしていった。産業革命である。人間の営みは工場と管理組織と家庭に分かれた。
19世紀半ばにはモールス通信の利用や電気の活用や電話の発明がおこり、通信革命が一斉に始まった。エンコード(入力)とデコード(再生)の技術が分かれたのである。ほぼ同時に新聞・雑誌・通信が発達し、人間はメディアなしにはいられなくなった。映画やラジオや録音レコードもスタートを切った。こうして20世紀、マスプロダクト・マスセールによる工業革命と消費革命が推進され、人間は以上すべての多様多岐のマンマシン・システムの中にネットワークされることになったのである。
しかし、これらはまだバラバラだった。それが大型電気計算機の登場によってしだいに様相が一変していくことになる。人間社会の事態は情報革命に向かって驀進していった。
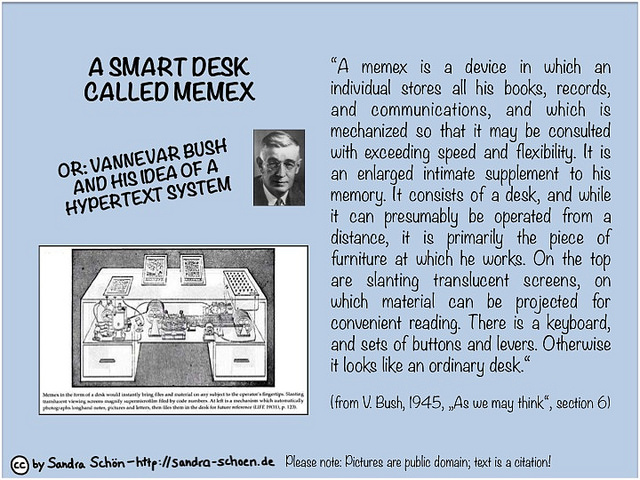
戦後すぐにMITのヴァネヴァー・ブッシュは情報革命について画期的な予想をした。「メメックス」(Memex)である。机ほどの大きさの情報器械がこれまでの知識を動かすことになるだろうと言ったのだ。60年代になると、テッド・ネルソンが「ザナドゥ」(Xanadu)構想を発表して、すべての情報はハイパーテキスト型になるだろうと予想した。
その直後、集積回路の素材加工と設計が飛躍的な躍進をとげ、ワンチップ・コンピュータが登場し、世界はPCとそのネットワークによってつながってきた。それとともに別々のメディアが重なり、しかもそれが手元でアクセスできるようになった。機器はかぎりなく小さく(軽薄短小に)なっていったのだ。
こうして90年代、これらをインターネットが一挙に包むと、バーナーズ=リーはWWW(ウェブ)のプロトコルをあっというまに工夫して、インターネット上でどんな知識も情報も交換できるようにした。ブルックスは時代技術が以上のような印刷革命・産業革命・通信革命・工場革命・消費革命・情報革命をおこすにつれ、「情報アクセスのプロセスに他人が関与しなくてもすむようになった」と書いている。

ロドニー・アレン・ブルックスは1954年にオーストラリアに生まれた。だから実年齢は“老いの一徹”というほどではない。フリンダース大学で「プラハの春」から逃れてきた若者たちとともに、まずはベーシックな数学を6年間学び、日曜日の12時間以上を大型コンピュータ(16キロバイト)に費やした。定理証明プログラム言語、記号積分ソフト、英文部分解釈アプリ、人工知能用プログラム、ゲームソフトづくりは、この青春期にそこそこの腕前に達したようだ。
1977年にスタンフォード大学の人工知能研究所(SAIL)のリサーチ・アシスタント(RA)に採用され、ハンス・モラヴェックに出会えた。『電脳生物たち』(岩波書店)、『シェーキーの子どもたち』(翔泳社)の、あのモラヴェックだ。SAILは「シェーキー」の開発で有名だが、当時はCartロボットを開発していて、ロボットに3次元の世界像をもたせることに躍起になっていた。モラヴェックのRAとして、ブルックスもその試みに没頭しようとしてみたのだが、どうも何かが違うと感じた。
ブルックスには、グレイ・ウォルターが1940年代に発表した「マシナ・スペクラトリクス」や「マシナ・ドシリス」といった概念で呼んでいたタートル・ロボットのほうが魅力的に思われたのだ。スイッチ素子と駆動モーターで組み合わさっているだけなのに、けっこうな条件反射学習ができる。
そもそもロボットは何を計算したらいい器械なのか。駆動系からフイードバックされるデータを知覚系に送るには、どのようなものがいいのか。ブルックスはそこを集中して考えた。
一般には計算は中枢としての「認識ボックス」に入るべきで、そのためボックスは高性能でないといけないと想定されてきた。しかしブルックスは、自分が取り組むロボットには「認識ボックス」がいらないのではないかと思う。センサーによる知覚とモーターによる駆動だけでいいのではないか、これらが効果的につながっていたほうがいいのではないか、そう思うようになった。「表象なき知性」でいいという判断だ。
こうして知能中枢に頼らないで、知覚系と駆動系を包摂したサブサンプション・アーキテクチャという方法思想が生まれたのである。

MITの人工知能研究所に移ったブルックスは、歩行ロボットにとりくむことにした。ある日、昆虫のビデオを見ていたら、しばしはかれらが足を踏みはずしたり、転びそうになっている。それまでロボット研究者はロボットがバランスを保つことを重視していた。MITでもマーク・レイバートがそういう歩行ロボットをつくろうとしていた。バランスをとるのが大変そうだった。
そうではなく、ロボットに転ばせてみたらどうなのか。歩くというより地表と格闘するようにしてもいいのではないか。
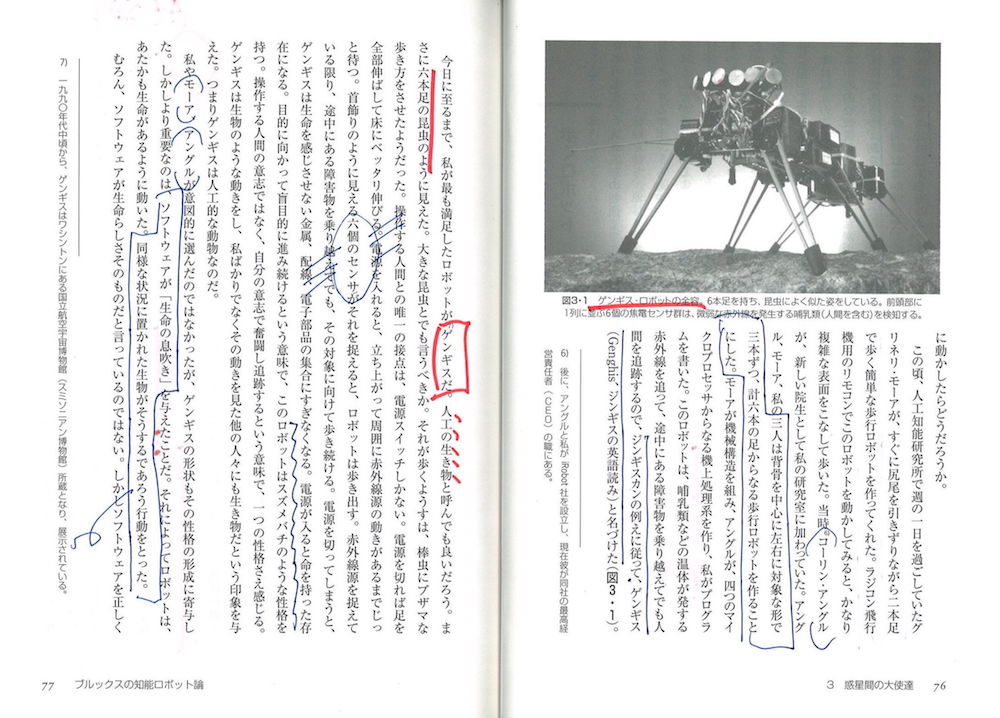
こうしてブルックスは、転びそうなのにそれを堪(こら)える六本足の歩行ロボット「ジンギス」(Genghis)の研究開発に乗り出した。ジンギスカンに肖ったネーミングだった。組み立ては1本のプログラムではなく、51個の小さな並列プログラム群で成立させた。ブルックスはこれを拡張有限マシン(AFSM Augumented Finite-State Machine)と名付けてみた。
51個のAFSMのうち、48個は平坦ではない経路と格闘するためのものになった。なかで重要だったのは、左寄りのウォークマシンが6本の足それぞれに順番に駆動信号を送るようにすることだった。残り3個のAFSMには「赤外線センサーに反応する」「漁り歩く」「舵をとる」という役割をもたせた。
ジンギスはブルックスの研究グループにカンブリア紀をもたらした。アレン、ポリー、アッティラ、ハンニバルといったジンギスの仲間たちがふえていった。それらは昆虫のような人工生物であり、ブルックスの人工生命(Artificial Life)の最初の一群になっていった。
ブルックスの発想は大きく見れば生物史的であり、文明史的である。はっきりいえば、好んで「試行錯誤」を採り入れるという技術思想だ。
試行錯誤によって何が獲得できるのかというと、「失敗から学べる」というのではなく(そんなことは技術革新にとっては当然なので)、器械が人間に向かうことによって、それまでわれわれが掴めていなかった人間の認知行動や文明社会にひそんでいた「らしさ」と「ルル3条」(ルール・ロール・ツール)が見えてくる可能性があるということだ。この獲得はかなり有意義だ。ぼくは、こういう方針は「ミミクリー」や「ミメーシス」としてそれなりに徹底していったほうがいいと思っている。
しかし他方、ライト兄弟の飛行機がそうであったように、鳥を真似た「はばたき」による飛行とはまったく異なる発想によって、われわれは空を飛べるようになったということもある。そういう予想外の技術も、いくらでもあっていい。
たとえば歩行ロボットということだけで言っても、車輪による走行(それも2輪も5輪も8輪も)、キャタピラ型のクローラ方式の歩行、オムニホイールなどわ使った全方向移動、ASIMOのような二足歩行、ボストン・ダイナミクスが得意な四足歩行、ウニやムカデやスパイダーのような多足歩行、そして無足歩行(ミミズやヘビ)やホッピングやバッタ型などもある。「歩く」「動く」「移る」といっても、いろいろなのである。
もっと重要な発想は、1体のロボットにさまざまな機能や知能を装填させるのではなく、いくつかのロボット群が「連」や「座」によって事態をクリアしていくこと、また人間と器械が手をとりあってマン・マシン的な連接によるロボットやアンドロイドとの共生を図ることだ。馬や牛が荷車を曳くことになっても、そこに人間がいないでいいとは思わないことである。自動化の幻想は、ときに技術社会の方向をおかしくもさせるのである。
ブルックスのロボティクスの構想には、その後、いくつもの不満が寄せられた。「人間」がいないのではないか、「知能」や「認知」にもとづく工学的適応力がないのではないか、ブルックスのロボットはいつまでたっても「言葉」を理解できないのではないか。そういうものだ。
これらの批判はほぼ当たっている。ブルックスのロボットはあくまで行動主義的なロボット(behavior-based robot)なのである。認知主義ではない。だから記号表現は不得意だ。だがブルックスは、あえてそれをめざしてきたのだった。器械や機械が「人間もどき」を演じるには、そのほうが工学的な波及力をもっと、確信しているからだろう。
さあ、はたしてそうなのか、どうか。議論はここから分かれていく。ひとつはロボット研究を介して「存在」の拡張を探求するという方面へ、もうひとつは「機械」の創発をめざす方面に。これは「弱いロボット」と「強いロボット」の競り合いにもなっていくし、哲学や文明論の分岐点にもなっていく。

⊕ ブルックスの知能ロボット論 ⊕
∈ 著者:Rodney A. Brooks
∈ 訳者:五味隆志
∈ 発行者:佐藤政次
∈ 発行所:株式会社オーム社
∈ 組版:さくら工芸社
∈ 印刷:三美印刷
∈ 製本:坂田製本
∈ カバーデザイン:アトリエ渋谷
∈∈ 発行:平成18年1月30日
⊕ 目次情報 ⊕
∈∈ 日本語版へのまえがき
∈∈ プロローグ
∈ 機械達との饗宴
∈ 人工生物の実現を目指して
∈ 惑星間の大使達
∈ もうすでに二〇〇一年
∈ 人間と住む機械
∈ 私達はいまどこに?
∈ 人間はユニークな存在か?
∈ 私達は特別な存在ではない
∈ 彼らと私達
∈ 私達と機械達
∈ 付録 ゲンギスロボットの動作原理
∈∈ エピローグ
⊕著者略歴 ⊕
五味 隆志(ごみ・たかし)
1967年早稲田大学大学院理工学研究科博士課程終了。71年カナダ・アルバータ州立大学大学院助手。73年ベル・ノーザン研究所研究員。83年アプライド・AI・システムズ社創立、社長。95年(株)AAIジャパン創立、代表取締役。97年福井大学客員教授、2000年琉球大学客員教授。2002年カナダ・グエルフ大学客員教授。工博(北大)
.jpg){kind=link}
{kind=link}
{kind=link}