AIロボットもAL(アーティフィシャルライフ)ロボットも、ヒューマノイドやアンドロイドも、そのR&Dの深度と速度はかなりめざましく、かつては思いもよらなかったようなセンサー技術やマニュピレーション技術や深層学習技術がロボット化できつつあるようになっている。しかしそれでも、ブルックスが1986年に提起した「サブサンプション・アーキテクチャ」(SA=包摂アーキテクチャ)の方法思想は、いまなおかえって燃えさかっているように思う。
本書はブルックスの包括的なインテリジェント・ロボットに関する見解をまとめたもので、その後の、たとえばアイロボット社(ブルックスはCTO)でお掃除ロボット「ルンバ」を開発して大当たりをしたのちの、またAIロボットやシンギュラリティ議論が沸騰してからの、そういう新たなロボットは入っていない。Cogやキスメットやジンギスまでしか扱われていない。
人と協働するロボット「Sawyer」とロドニー・ブルックス(右) 米国Rethink Robotics社が開発・生産する人工知能の技術を活かした単腕型・高性能産業用ロボット。Rethink Robotics社は、ロドニー・ブルックス博士によって2008年に設立された。
by Steve Jurvetson (CC 表示 2.0)
ブルックスはずっと以前に京都で会ったかぎりはけっこう人なつこいし(トム・レイも一緒だった)、まずまずの日本贔屓でもあるが、文明の在り方についてはコンサバで頑固である。斬新なアイディアの持ち主ではあるけれど、技術信奉主義者ではないし、ICT一辺倒でもない。
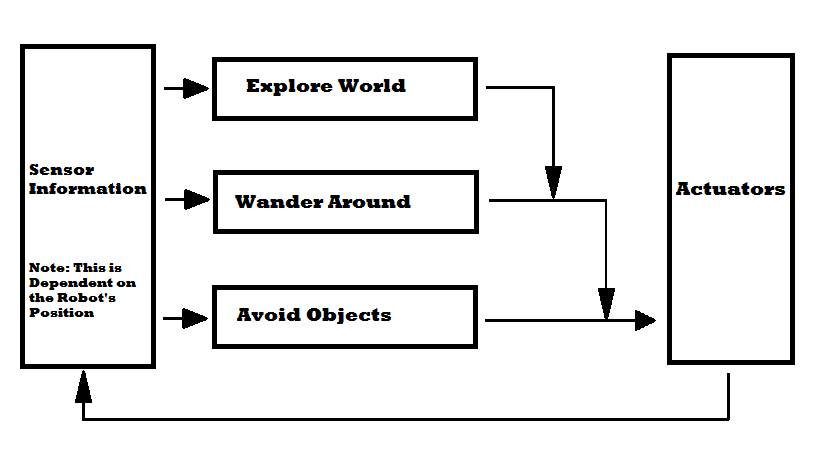
サブサンプション・アーキテクチャをもつロボットのモジュールは、ごくごく基本的な検知(sensing)と行動(action)ができる反応エージェントになっている。それぞれのエージェントは階層構造に所属する。
サブ・サンプション・アーキテクチャー(Subsumption Architecture、包摂アーキテクチャ)
ブルックスの設計思想にもとづいて開発されたルンバの場合でいえば、アーキテクチャーの階層はそれだけだったのかというほどシンプルで、、大きくは「危険回避」(avoid)、「行動」(wander)、「目的」(explore)でできている。まずは障害物や危険を回避して、さまざまな行動をおこし、状況を把握していく。この一徹だ。
VIDEO
ルンバ 最新モデル980
ふりかえって人間と器械の関係を見てみると、人類が棍棒や容器を使うようになって、すぐに思いついた器械らしきものは車輪だった。約8500年前のことだ。それがシュメール人によって動物が曳く荷車になるまではさらに3000年がかかったが、それによって人間は車輪を直接に動かすのではなく、馬に方向や速さを指示するだけでよくなった。これは器械が自立の第一歩を踏み出したということだ。水時計や風車がそんなふうにして工夫されていった。
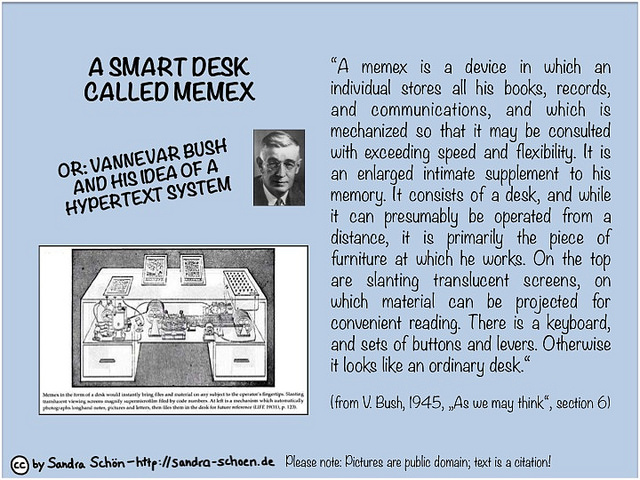
戦後すぐにMITのヴァネヴァー・ブッシュは情報革命について画期的な予想をした。「メメックス」(Memex)である。机ほどの大きさの情報器械がこれまでの知識を動かすことになるだろうと言ったのだ。60年代になると、テッド・ネルソンが「ザナドゥ」(Xanadu)構想を発表して、すべての情報はハイパーテキスト型になるだろうと予想した。
MEMEX(メメックス) MEMory EXtender(記憶拡張機)の略。ヴァネヴァー・ブッシュが1945年の The Atlantic Monthly 誌の記事 “As We May Think” (AWMT) で発表したハイパーテキストの元となったシステムの概念。後のハイパーテキスト開発や個人用知識ベースソフトウェア開発に多大な影響を与えた
by Sandra Schön (CC 表示 2.0)
バーナーズ=リーとNeXTcube イギリスの計算機科学者。ロバート・カイリューとともにWorld Wide Web(WWW)を考案し、ハイパーテキストシステムを実装・開発した人物。またURL、HTTP、HTML の最初の設計者。写真のNeXTcubeはリーが欧州原子核研究機構 (CERN)で使用していたものであり、初のWebサーバとなった。
by Coolcaesar (CC 表示-継承 3.0)
ロドニー・アレン・ブルックスは1954年にオーストラリアに生まれた。だから実年齢は“老いの一徹”というほどではない。フリンダース大学で「プラハの春」から逃れてきた若者たちとともに、まずはベーシックな数学を6年間学び、日曜日の12時間以上を大型コンピュータ(16キロバイト)に費やした。定理証明プログラム言語、記号積分ソフト、英文部分解釈アプリ、人工知能用プログラム、ゲームソフトづくりは、この青春期にそこそこの腕前に達したようだ。
グレイウォルターとタートルロボット バッテリーと移動するためのタイヤとモーター、そして電圧低下時に自分で専用の充電場所を見付けるための光センサーとアナログ的な電子頭脳を持っている。
by Spiessens (CC 表示 4.0)
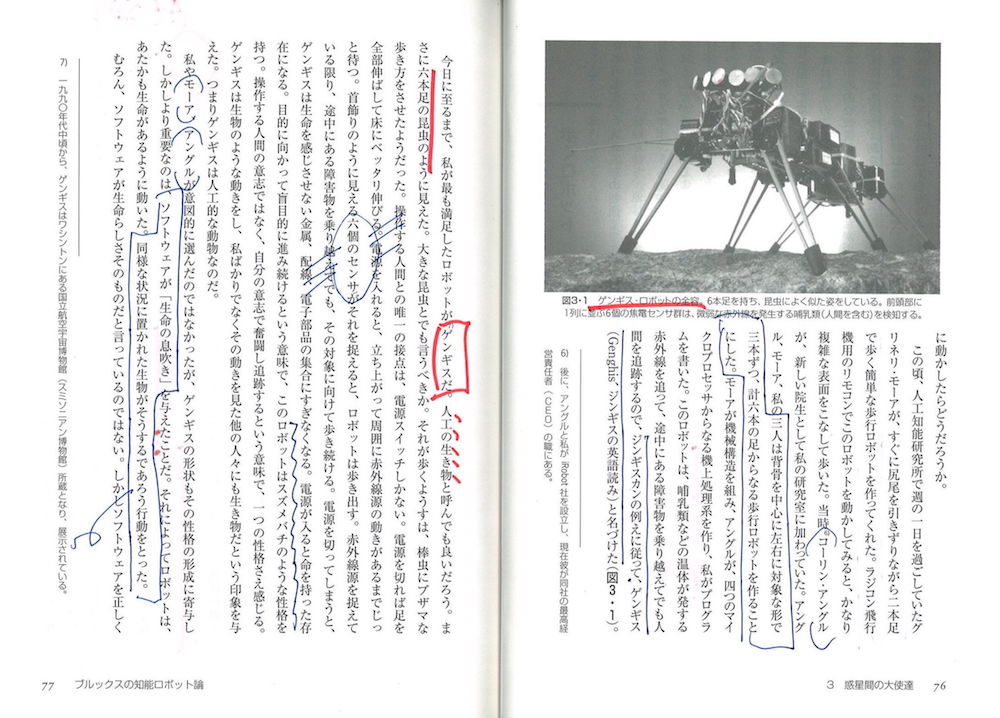
MITの人工知能研究所に移ったブルックスは、歩行ロボットにとりくむことにした。ある日、昆虫のビデオを見ていたら、しばしはかれらが足を踏みはずしたり、転びそうになっている。それまでロボット研究者はロボットがバランスを保つことを重視していた。MITでもマーク・レイバートがそういう歩行ロボットをつくろうとしていた。バランスをとるのが大変そうだった。
VIDEO
初期のゲンギス(Genghis)
ゲンギス・ロボットと本書の松岡マーキング
ブルックスの発想は大きく見れば生物史的であり、文明史的である。はっきりいえば、好んで「試行錯誤」を採り入れるという技術思想だ。
⊕ ブルックスの知能ロボット論 ⊕
∈ 著者:Rodney A. Brooks
∈∈ 発行:平成18年1月30日
⊕ 目次情報 ⊕
∈∈ 日本語版へのまえがき
∈∈ エピローグ
⊕著者略歴 ⊕









.jpg){kind=link}
{kind=link}
{kind=link}